麦俊佳,崔巍,曾懿辉
(1.南方电网广东佛山供电局,广东 佛山 528000;
2.华南理工大学 a.土木与交通学院;
b.自动化科学与工程学院,广东 广州 510640)
输电线路在电力系统中承担着电能输送的重要任务,为了保证线路安全稳定运行,线路运维单位制订了严格的定期巡维措施[1-2]。然而传统的人工巡视危险性高,劳动强度大,巡检效率低,已不能满足日益严格的输电线路巡检要求。现有的无人机巡视对人员素质和技术水平要求较高,存在着自动化水平低、巡检效率和质量难以保障等问题[3]。无人机巢的发展与应用为输电线路巡检提供了新的思路。通过合理配置无人机巢,不仅能实现覆盖区域内输电线路的全自主巡检,替代人工运维,而且还能减少巡检时间,提高电网运维效率[4]。
目前输电线路巡检无人机巢的研究主要分为无人机巢设计与技术优化层面和无人机巢电力巡检应用层面。在设计上,国内外相关学者已经做了大量的研究,通过智能换电、视觉降落、远程监控等技术,实现安全高效的远程巡检[5-7]。在应用上,加拿大的SkyX公司研发了一种专门为无人机充电的xStation,实现了无人机远程通道巡检[8]。国网江西省电力有限公司将无人机巢应用于输电线路巡检业务,探索一种“巢-巢”巡检新模式[9]。虽然无人机巢的研发与应用受到了国内外学者的广泛关注,但目前大多数研究还集中在无人机巢的研发设计和应用模式优化方面,对于无人机巢的具体选址问题鲜有研究。仅少数学者如杨磊等对驻塔机场和变电站地面机场联合部署优化线路巡检问题进行研究[10],Liu等提出了一种对线路杆塔进行聚类得出无人机巢优化部署位置的方法[11]。该类研究主要针对少量输电线路杆塔巡检情况,或针对由巡检车辆改装的移动式机巢部署和驻塔机巢部署进行分析;
移动式机巢仍然需要人工操作,不能实现全自主巡检,驻塔机巢受限于供能和杆塔改造等问题,技术尚未成熟[12]。对于技术相对成熟的固定式机巢[12],关于其选址部署问题的研究仍然不充分,缺少对无人机巢成本、部署位置和其他智能设备搭配部署等因素的分析。考虑无人机巢成本较高,过度的建设不仅造成资源浪费,也不利于无人机巢技术的长远发展。因此在电力巡检的实际应用过程中,无人机巢的配置部署是亟需解决的重要问题之一。
本文在总结现有研究的基础上,对固定式无人机巢配置部署问题进行研究,提出一种输电线路巡检无人机巢配置部署方法。结合改造区域内电网设备情况、无人机巢和在线监控装置可部署位置、覆盖范围和建设运维成本等,建立整数规划模型,运用改进模拟退火算法对模型求解,计算无人机巢最优部署位置,以总成本最少为目标,实现改造区域内智能设备的最优部署和全自主巡检,进而达到最大化无人机巢应用的目的。
在新型的输电线路巡检模式中,区域内可部署无人机巢和在线监控装置2类智能设备,以实现无人化巡视。其中无人机巢分为大型无人机巢和小型无人机巢,大型无人机续航时间较长,巡检覆盖半径6.5 km,小型无人机续航时间较短,巡检覆盖半径4 km,而在线监控装置只能开展一个杆塔区段线路的巡检工作。由于电源、信号、安全等条件限制,无人机巢只能部署于变电站或供电所内,在线监控装置可部署于铁塔上。图1为无人机巢部署示意图,红点位置为可部署无人机巢的变电站或供电所,虚线圆圈为无人机巢巡检覆盖区域,三角形为输电线路杆塔,无人机巢巡检覆盖区域内的杆塔用黑色三角形表示,没有覆盖的杆塔用蓝色三角形表示。为方便定量研究,对问题进行简化,做出如下假设:
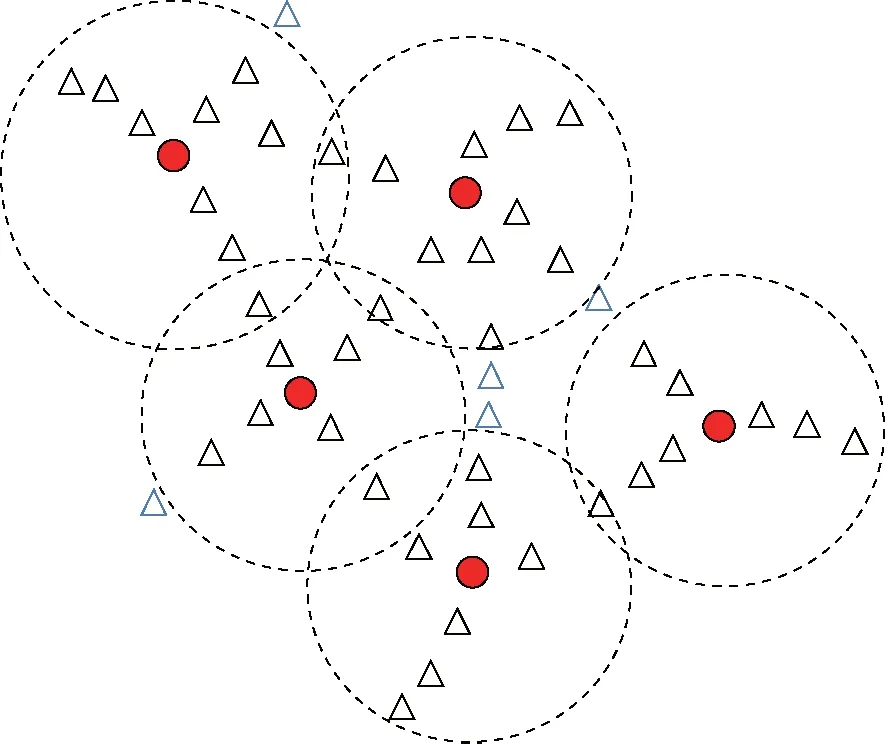
图1 无人机巢部署示意图
a)所有变电站、供电所可部署机巢的位置和杆塔位置均已知;
b)无人机巢分为2种规格,大型无人机巢巡视覆盖半径为6.5 km,小型无人机巢巡视覆盖半径为4 km,其安装、运维和飞行成本均已知,安装和运维成本为固定值,飞行成本仅与飞行里程相关;
c)需要实现目标区域内智能设备全覆盖,在无人机巢未覆盖区域安装在线监控装置进行补充,以实现无人化巡视;
d)在线监控装置的安装、运维成本均已知,为固定值;
e)目标区域内没有飞行空域限制,每基杆塔只能由无人机巢或在线监控装置二者之一提供巡视服务。
设:I为给定部署无人机巢所有候选站点集合,i∈I;
J为所有输电线路杆塔集合,j∈J。假设研究区域内智能设备全覆盖,即区域内每基杆塔可以通过无人机巢或在线监控装置进行巡视覆盖,且只能通过其中一种方式进行巡视覆盖,那么构建的智能设备运用布局优化模型为:

(1)
(2)
(3)
(4)
Xij-xi≤0 ,∀i∈I,∀j∈J;
(5)
Yij-yi≤0 ,∀i∈I,∀j∈J;
(6)
dijXij≤Dx,∀i∈I,∀j∈J;
(7)
dijYij≤Dy,∀i∈I,∀j∈J;
(8)
xi∈{0, 1} ,yi∈{0, 1} ,Xij∈{0, 1} ,
Yij∈{0, 1} , ∀i∈I,∀j∈J.
(9)

目标函数式(1)为布局方案折算到每年的总成本最小化,该总成本包括大型无人机巢和小型无人机巢的建设、运营和飞行服务成本,以及在线监控装置的建设、运营和巡视服务成本;
约束式(2)限制了建设的大型无人机巢数量上限;
约束式(3)限制了建设的小型无人机巢数量上限;
约束式(4)表示每基杆塔最多只能有1个无人机巢提供巡视服务;
约束式(5)表示没有建设大型无人机巢的站点不能为相应的杆塔提供巡视服务;
约束式(6)表示没有建设小型无人机巢的站点不能为相应的杆塔提供巡视服务;
约束式(7)限制了大型无人机巢的服务半径;
约束式(8)限制了小型无人机巢的服务半径;
约束式(9)限制了4个决策变量的取值范围。
本文所述问题属于整数规划问题,常用求解方法有分支定界法和割平面法,但是这2种方法只适用于模型约束变量较少的情况。针对本文所构建的智能设备运用布局优化模型而言,这2种方法显然己经不能适用,所以应该选取搜索能力和动态寻优效果更好的启发式算法作为模型的求解算法,如模拟退火算法、遗传算法和混沌算法等[13-14]。模拟退火算法借鉴了统计物理学的思想,基于优化问题求解过程与金属退火过程的相似性,将优化目标变为能量函数,以随机扰动模拟粒子的热运动来求解优化问题[15]。该算法简单通用,并具有概率性全局最优性能,在科研和工程中得到了广泛的应用[16-17]。
因此,本研究采用模拟退火算法进行求解计算,并对传统算法进行改进,针对无人机巢部署问题提出最大化巡视服务原则优化新解生成方向,以达到更好的求解效果。传统的模拟退火算法流程如图2所示,主要由状态产生函数、状态接受函数、内循环终止准则、外循环终止准则和温度更新函数构成。状态产生函数是指由当前解随机产生新的候选解的方法;
状态接受函数是指接受候选解的机制,通常采用Metropolis准则进行判断;
内循环是在每次温度下循环迭代产生新解的过程,寻找在该温度下能量的最小值;
外循环是退火降温过程,即冷却进度表控制的温度循环;
温度更新函数是指退火温度缓慢降低的实现方案,也称冷却进度表[18]。
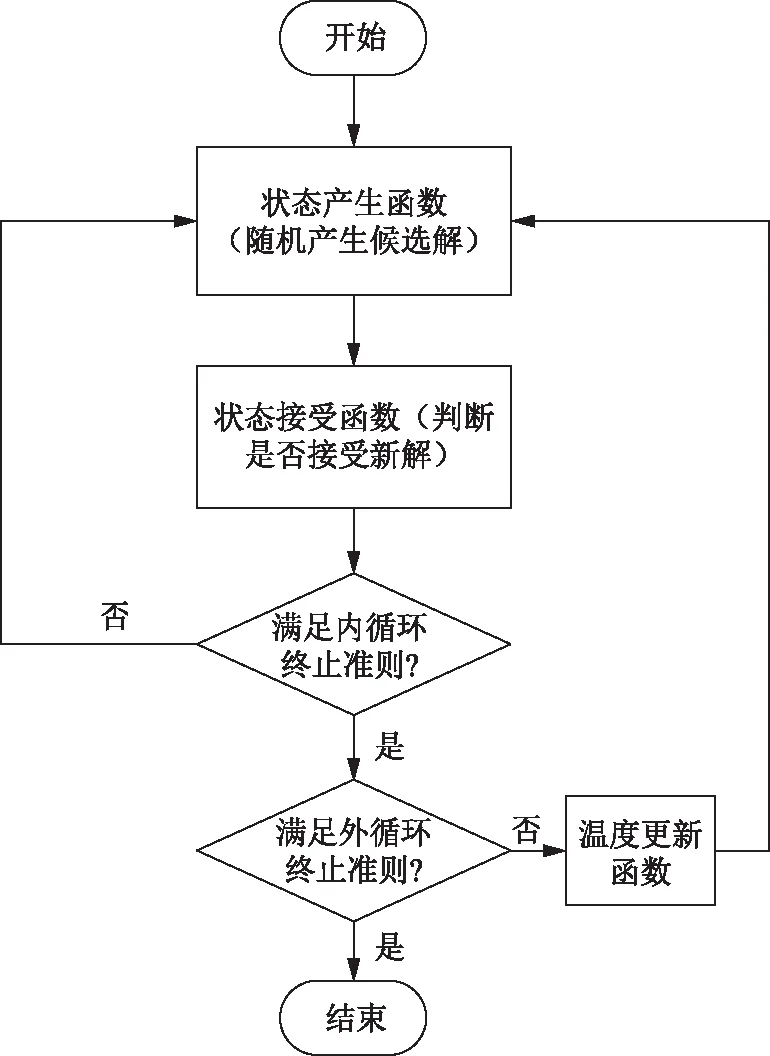
图2 模拟退火算法流程
传统的模拟退火算法以一定概率接受较差解,因此有可能跳出局部最优,获得全局最优解。但对于大规模问题,随机搜索空间较大,降温过程需要足够缓慢才能保证搜索得到相对较优解,同时收敛速度变慢,求解时间变长;
如果提高收敛速度,加快降温过程,则容易陷入局部最优,难以获得全局最优解。针对无人机巢部署问题,由于求解区域动辄几百上千基杆塔,求解变量较多,为了达到求解速度和效果综合最优,设计了改进模拟退火算法,对状态产生函数进行改进,按照无人机巢最大化巡视服务原则对产生新解进行规则约束,以缩小搜索空间,提高搜索效率。改进后的模拟退火算法基本步骤如下:
a)初始化:设置初始温度T、迭代次数L、温度冷却系数r、终止温度Tf,计算模型的变量系数。
b)生成初始解:按照机巢候选点全选、最大化无人机巢巡视范围的原则,生成初始解C。
c)生成新解:通过变换操作,在当前解C的基础上,随机生成新的无人机巢部署点,并按照最大化无人机巢巡视范围的原则,将部署机巢点服务范围内所有变量全部置1,然后选定一定数量变量继续变换,将不满足约束变量置0,从而生成新解C′。
d)准则判断操作:根据模拟退火中Metropolis接受准则,对新解进行退火操作来实现新旧解的替换,计算能量差ΔE(即新解的目标函数与原有解的目标函数的成本差),若ΔE<0则接受C′作为新的当前解,否则以概率exp(-ΔE/T)接受C′作为新的当前解。
e)内循环操作:对每个温度状态,重复L次循环产生和概率性接受新解。
f)判断终止条件:在每个温度状态完成L次内循环后,则按照T′=rT降低温度,转步骤c)继续循环,直到达到终止温度Tf。
根据上述步骤,改进模拟退火算法流程如图3所示。
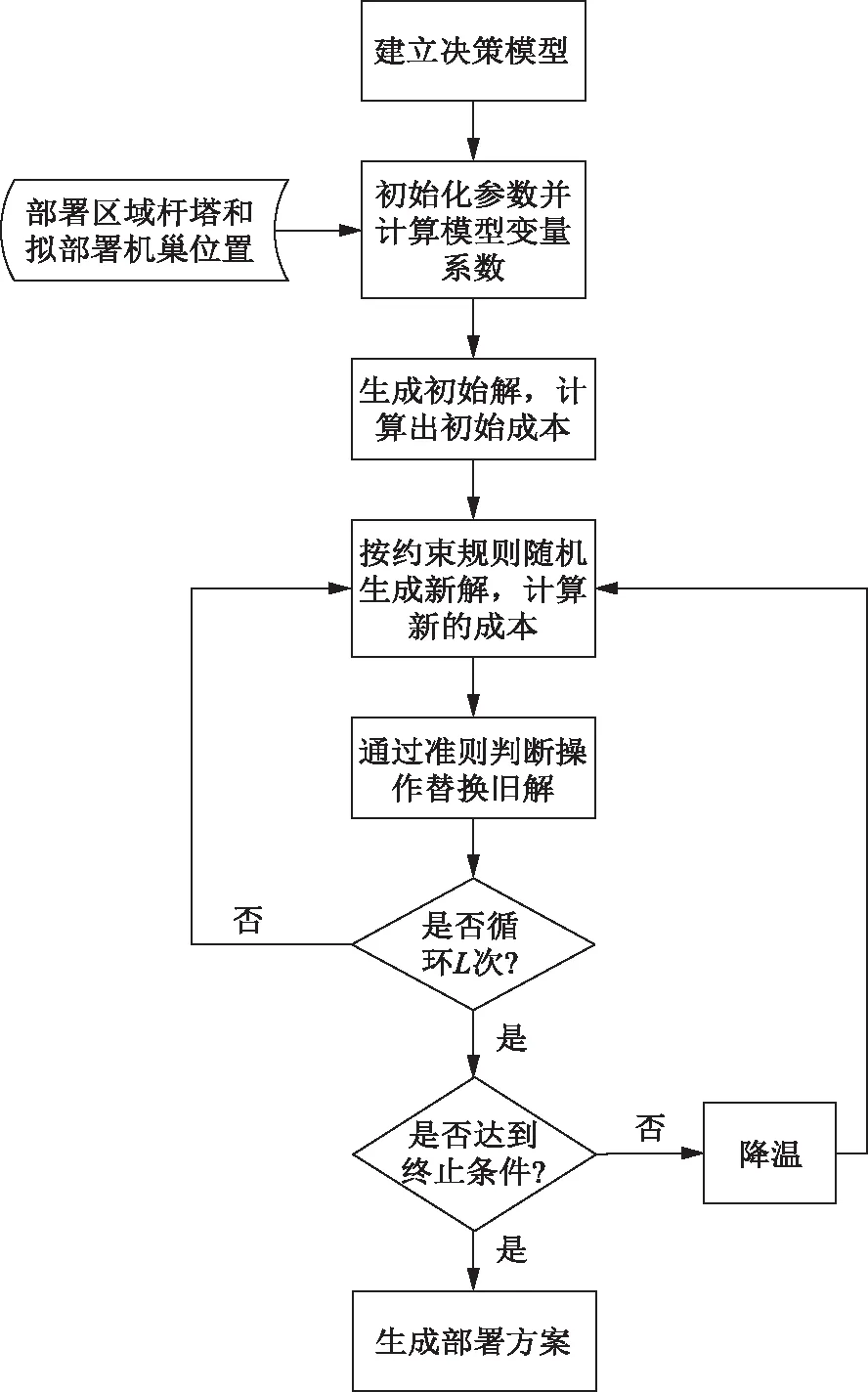
图3 改进模拟退火算法流程
为了验证算法的有效性,本文以佛山某片区为例,采用Python编程来实现计算区域内无人机巢最优部署方案。该区域内覆盖了22条输电线路、500多基杆塔,杆塔位置如图4中红点所示。区域内拟部署的智能设备大致分为大型无人机巢、小型无人机巢和在线监控装置。大型无人机巢和小型无人机巢只能部署在变电站和供电所内,变电站具体分布如图4中点A—J所示,共10个拟部署机巢点。在线监控装置可部署在线路杆塔上。

图4 佛山某片区站点及杆塔位置
为方便计算,各点之间的无人机飞行距离采用直线距离。应用改进模拟退火算法,随机选取部署机巢点,按规则生成新解,并按约束条件对新解进行判断,不满足约束条件的解重置为0,形成满足约束条件新解,计算结果进行迭代。模型与算法具体参数设置见表1。经过10次运算测试,选取计算结果中的最小值,确定最终方案如图5所示。在图5中C、H站点部署大型无人机巢,在E站点部署小型无人机巢,虚线圆圈内为无人机巢服务范围,无人机巢提供巡视服务杆塔点用部署机巢站点相应颜色表示,在线监控装置提供巡视服务杆塔点用黄色点表示,该方案最低总成本为176.54元。

图5 佛山某片区无人机巢部署结果

表1 部署优化模型与改进模拟退火算法参数设置
为了进一步验证本文所设计算法的求解能力,分别采用传统模拟退火算法和遗传算法对模型进行求解。对于传统模拟退火算法,参数设置与改进算法一致,按照满足约束条件前提下随机生成新解方式进行迭代计算;
对于遗传算法,设置初始种群规模为500,最大进化代数为4 000,通过交叉和变异进行迭代计算。为了保证对比结果的有效性,采用同样的计算时间测试。设定计算时间为20 min,得到的数据见表2。从表2可以看出在相同时间内,本文算法求解得到的最低总成本和多次计算标准差均比传统模拟退火算法和遗传算法小,计算结果更优,这表明本文的算法比其他2种算法具有更好的鲁棒性和稳定性。

表2 最低总成本计算结果对比
选取改进模拟退火算法和传统模拟退火算法运算中结果最小的计算数据进行详细分析,其收敛性能对比如图6所示。从图6可知,传统模拟退火算法相较于改进模拟退火算法虽然迭代次数更少、收敛速度更快,但求解得出的最低总成本较高,这说明传统模拟退火算法寻优能力较差,很容易陷入局部最优,随机生成新解不确定性比较大,程序容易停滞不前,很难找到最优解。而改进模拟退火算法寻优能力更强,不会陷入局部最优解。

图6 收敛性能对比
为了体现大型无人机巢、小型无人机巢和在线监控装置联合部署的优越性,本文对仅使用在线监控装置、“大型无人机巢+在线监控装置”和“小型无人机巢+在线监控装置”3种部署方式进行求解,结果见表3。由表3可知,联合部署模式成本较低,说明无人机巢和在线监控装置联合部署具有一定的优势,可有效降低区域内智能设备部署成本,提高智能设备利用率。

表3 智能设备部署结果对比
本文针对输电线路巡检无人机巢应用部署存在的问题,采用一种定量决策方法,建立整数规划模型,以最小化总成本为目标,计算无人机巢最优部署位置,实现最大化无人机巢应用的目的。根据问题特性,提出了改进模拟退火算法对模型求解,并与传统模拟退火算法和遗传算法求解结果进行对比,验证了模型的可行性和改进算法的有效性。数值实验结果表明,改进模拟退火算法比传统的模拟退火算法和遗传算法求解性能更好、效果更优。该方法为输电线路巡检无人机巢的配置部署提供了决策依据,解决了输电线路智能改造的实际问题,有效地降低了无人机巢部署成本,提高了无人机巢利用率,具有工程实际应用价值。
本文仅考虑了2类无人机巢与在线监控装置搭配部署问题,未考虑更加复杂的决策部署情况,以及空域限制、大气环境、无人机航线规划等影响因素。在下一步的研究中,可综合考虑多种影响因素,对无人机巢决策部署模型进行改进。
猜你喜欢模拟退火杆塔部署基于北斗的高压输电杆塔智能实时监测技术与应用卫星应用(2022年1期)2022-03-09一种基于Kubernetes的Web应用部署与配置系统成都信息工程大学学报(2021年5期)2021-12-30晋城:安排部署 统防统治今日农业(2021年7期)2021-07-28部署非公有制企业党建(2020年5期)2020-06-16基于ZigBee与GPRS的输电杆塔倾斜监测预警系统电子制作(2019年11期)2019-07-04模拟退火遗传算法在机械臂路径规划中的应用测控技术(2018年3期)2018-11-25部署“萨德”意欲何为?太空探索(2016年9期)2016-07-12基于粗糙模糊集的输电杆塔塔材实际强度精确计算电测与仪表(2016年23期)2016-04-12基于模糊自适应模拟退火遗传算法的配电网故障定位电测与仪表(2016年17期)2016-04-11SOA结合模拟退火算法优化电容器配置研究电源技术(2015年5期)2015-08-22扩展阅读文章
推荐阅读文章
明翰范文网 www.tealighting.com
Copyright © 2016-2024 . 明翰范文网 版权所有
Powered by 明翰范文网 © All Rights Reserved. 备案号:浙ICP备16031184号-2